![]()
Important
Recipe Terminology:
self=MapData
self.bot=sc2.bot_ai.BotAI
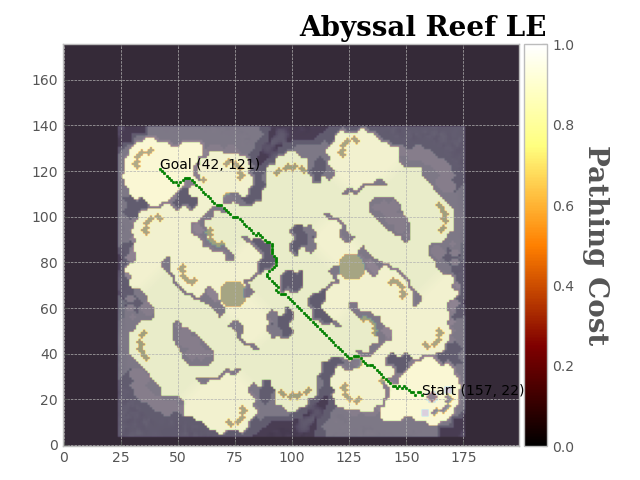
PathFinding Terminology:
cost: How much is it going to cost the pather to walk through this cell
weight_array: a finalized grid(with added cost) passed to plotting
the optimal cost will be 1,
the worst cost would be
numpy.inf(for non pathable cells)
you should keep that in mind if you want to create a complex influence map with different weights
Be sure to check out dummybot.py for example bot usage with some handy debug methods
Pathfinding - Recipes¶
Pathfinding - from our main to the enemy’s main¶
>>> my_base_raw_location = self.bot.townhalls[0].position
>>> my_region = self.where_all(my_base_raw_location)[0]
>>> enemy_main_region = self.where_all(self.bot.enemy_start_locations[0].position)[0]
>>> start = my_region.center
>>> goal = enemy_main_region.center
>>> grid = self.get_pyastar_grid()
>>> path = self.pathfind(start=start, goal=goal, grid=grid, sensitivity=3)
>>> path
[(37, 55), (40, 58), (43, 61), (44, 64), (47, 67), (50, 70), (52, 73), (52, 76), (52, 79), (54, 82), (57, 82), (60, 82), (63, 82), (66, 82), (69, 82), (72, 82), (75, 82), (78, 82), (81, 82), (84, 82), (87, 82), (90, 82), (93, 82), (96, 82), (99, 82), (102, 82), (105, 82), (108, 82), (111, 82), (114, 82), (117, 82), (120, 82), (123, 82), (126, 82), (129, 82), (132, 82), (135, 82), (138, 82), (141, 82), (144, 82), (147, 82), (150, 82), (153, 82), (155, 79), (155, 76), (155, 73), (157, 70), (160, 67), (163, 64), (164, 61), (167, 58), (170, 55), (173, 52)]
Plot and Debug the Pather - In Game¶
Contributed by rasper (github)
>>> grid = self.get_air_vs_ground_grid()
>>> # self.draw_influence_in_game(grid) # commented out to not fail doc tests
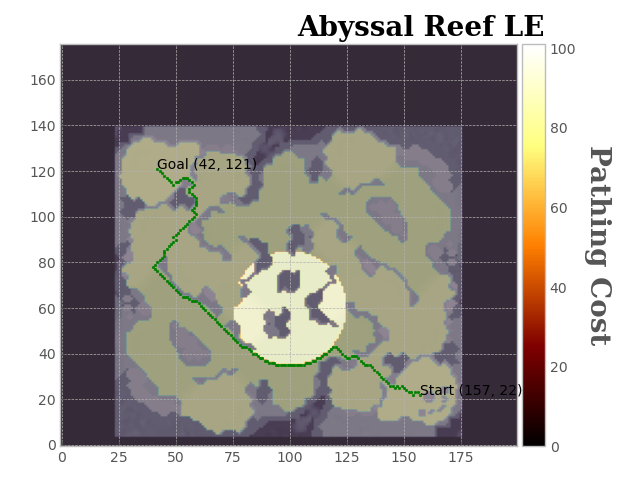
Plot and Debug the Pather¶
>>> my_base_raw_location = self.bot.townhalls[0].position
>>> my_region = self.where_all(my_base_raw_location)[0]
>>> enemy_main_region = self.where_all(self.bot.enemy_start_locations[0].position)[0]
>>> start = my_region.center
>>> goal = enemy_main_region.center
>>> grid = self.get_pyastar_grid()
>>> # commented out for doc tests
>>> # path = self.plot_influenced_path(start=start, goal=goal, weight_array=grid)
>>> # self.show()
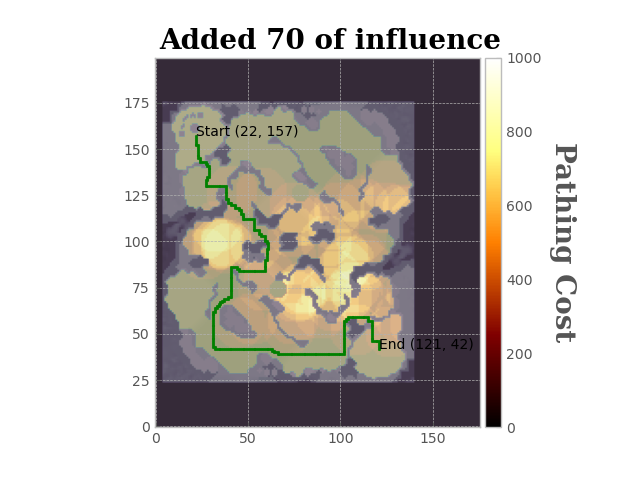
Plotting our custom Cost¶
Let’s add a cost with a big radius (25) and the default weight of 100, in a point we know is in our path
>>> my_base_raw_location = self.bot.townhalls[0].position
>>> my_region = self.where_all(my_base_raw_location)[0]
>>> enemy_main_region = self.where_all(self.bot.enemy_start_locations[0].position)[0]
>>> start = my_region.center
>>> goal = enemy_main_region.center
>>> grid = self.get_pyastar_grid()
>>> p = (100,60) # the center point of which to add cost
>>> grid = self.add_cost(position=p,radius=25, grid=grid )
>>> # commented out for doc tests
>>> # path = self.plot_influenced_path(start=start, goal=goal, weight_array=grid)
>>> # self.show()